|
Guo Wenkai (郭文锴) Hi! I'm currently a first-year PhD student in PINE Lab at Nanyang Technological University (NTU) in Singapore, where I am fortunate to be supervised by Professor Wang Ziwei. Previously, I graduated as a MSc from NTU. I received my BEng in School of Automation at Southeast University, supervised by Professor Li Shihua, Professor Du Songlin, and Professor Wang Yangang. My research interests lie in robotic foundation models and reinforcement learning in robotic manipulation. Generally, I am passionate about advancing the field of robotics by integrating cutting-edge AI techniques to enable robots to perform complex tasks in dynamic environments. Email / Google Scholar / LinkedIn / GitHub |
Taken in Taipei, 2024 |
News
|
Recent Works |
|
VLA-Reasoner: Empowering Vision-Language-Action Models with Reasoning via Online Monte Carlo Tree Search
Wenkai Guo*, Guanxing Lu*, Haoyuan Deng, Zhenyu Wu, Yansong Tang, Ziwei Wang IEEE International Conference on Robotics and Automation (ICRA), 2026 project page / arXiv / |
|
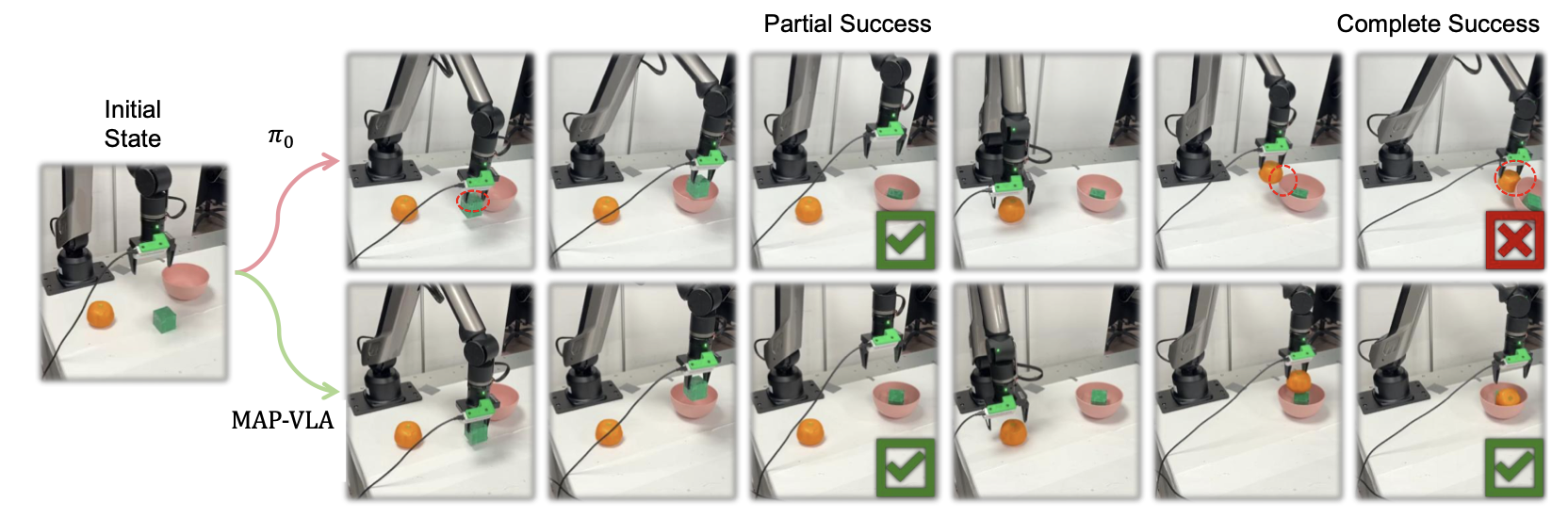
Map-VLA: Memory-Augmented Prompting for Vision-Language-Action Model in Robotic Manipulation
Runhao Li, Wenkai Guo, Zhenyu Wu, Changyuan Wang, Haoyuan Deng, Zhenyu Weng, Yap-Peng Tan, Ziwei Wang IEEE International Conference on Robotics and Automation (ICRA), 2026 project page / arXiv |
|
SafeBimanual: Diffusion-based Trajectory Optimization for Safe Bimanual Manipulation
Haoyuan Deng, Wenkai Guo, Qianzhun Wang, Zhenyu Wu, Ziwei Wang 9th Conference on Robot Learning (CoRL), 2026 project page / arXiv |
|
VLA-RL: Towards Masterful and General Robotic Manipulation with Scalable Reinforcement Learning
Guanxing Lu, Wenkai Guo, Chubin Zhang, Yuheng Zhou, Haonan Jiang, Zifeng Gao, Yansong Tang, Ziwei Wang arXiv, 2025 project page / arXiv / code |
Academic ServicesJournal Reviewer: RA-L Conference Reviewer: ICCV, AAAI |
|
Page views since February 2026 |
|
Last updated: February 2026. |